OPtical tracking for ergonomic analysis
ART systems support the human-robot-interaction laboratory of the Human-Machine Systems Engineering department at the University of Kassel, Germany.
The Human-Machine Systems Engineering department at the University of Kassel is examining in research and education the user-oriented configuration of effective and efficient human-robot-systems in a interdisciplinary approach. The interrelation between a human being and technical devices shall be optimized.
The tracking solution
In November 2012 ART was part of a tracking installation at the University of Kassel, Germany. The installation in shape of a cuboid has the dimensions 3.5 m width, 3.5 m depth and 2.8 m heigth. The ART localization system constituted of eight ARTTRACK2 cameras and enables real objects to be located within the tracking volume.
Applications
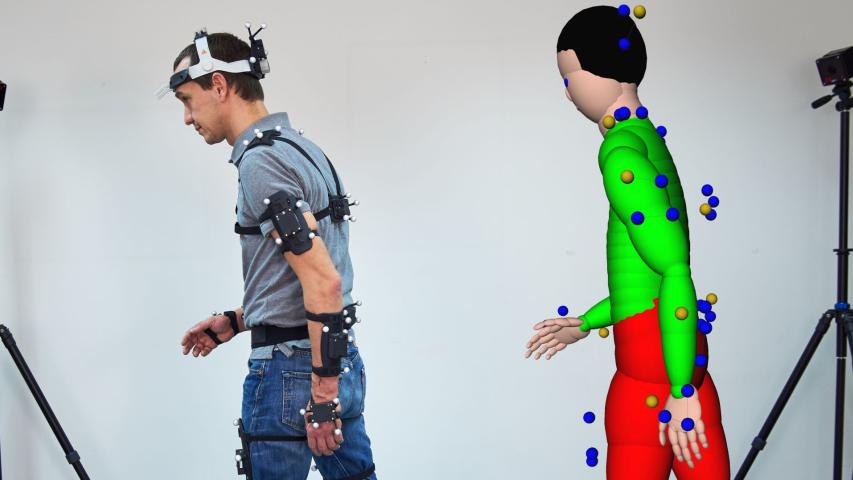
- ergonomic analysis of human-machine interaction:
The full ART MoCap target set is used to capture the posture and movements for an ergonomic analysis with RAMSIS and AnyBody - AR supervision and control:
In this setting the position of the head-mounted display is captured with the help of a passive hand target. It is used to control the movement of a stereo camera system, which is located on top of a tele-operated mobile robot. - gesture control:
The active fingertracking devices are used to capture the gestures to steer teleoperated drones. The full ART Motion Capture target set is used for gesture control of the movement of a teleoperated mobile robot.
Why ART ?
- Complete tracking package by ART
- ART could provide the whole tracking package such as cameras, Body-, Head- and Fingertracking.
- ART's products are accurate and stable.
- The accuracy and stability of ART tracking technology allows very exact ergonomic studies.
Setup
- 3.5 m x 3.5 m x 2.8 m cuboid tracking volume
- 8 ARTTRACK2 cameras
- ART Motion Capture (body tracking), Head- and Fingertracking, Flystick
- ergonomic analysis of human-machine interaction, gesture control as well as AR supervision and control of teleoperated robots and drones

ART Motion Capture supports the human-robot-interaction laboratory in Kassel, Germany

ART Motion Capture for ergonomic analysis
")
ART tracking could also enable gesture control
")
ART tracking could also enable gesture control