In vielen Bereichen unseres Lebens sind computergestützte Simulationen nicht mehr wegzudenken: Produkte werden ohne Prototypenbau getestet, die Bedienung von Geräten wird trainiert, ohne Trainer oder ohne Gerät. Sogar Gruppentrainings mit Personen an verschiedenen Orten, die nur durch das Netzwerk verbunden sind, sind möglich.
Wenn Hersteller ihre Entwicklung mit Simulationen aufwerten und so den Bedarf an physischen Tests reduzieren, ist „X-in-the-Loop“ (XIL) ein bereichernder Ansatz: Sie nutzen die Effizienzeinsparungen virtueller Tests so weit wie möglich, fügen dort „echte“ Elemente hinzu, wo diese eine entscheidende Rolle spielen. Somit ermöglichen XIL Simulatoren frühere Tests, was wiederum eine schnellere Entwicklung bedeutet.
Moderne DIL-Simulatoren (Driver-in-the-Loop) sind ein immer wichtigeres Werkzeug im Werkzeugkasten, da sie es echten Menschen – den Endnutzern – ermöglichen, mit virtuellen Elementen und Systemen zu interagieren.
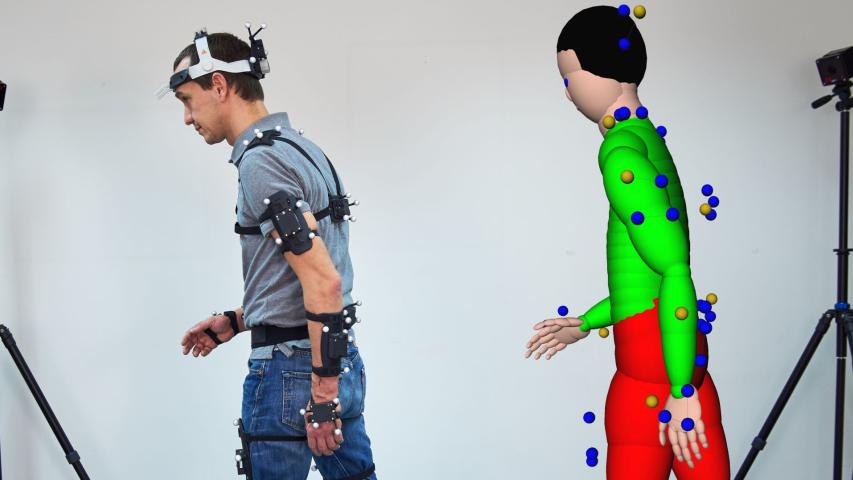
Überall dort, wo die genaue Position von Personen oder Objekten zuverlässig und genau in Echtzeit gemessen werden muss, sind die Geräte von ART im Einsatz.
Wir werden oft gefragt, warum ein optisches Trackingsystem von ART überhaupt notwendig ist, wenn die aktuelle IMU-Technologie die Kopfposition des Benutzers scheinbar selbstständig verfolgen kann.
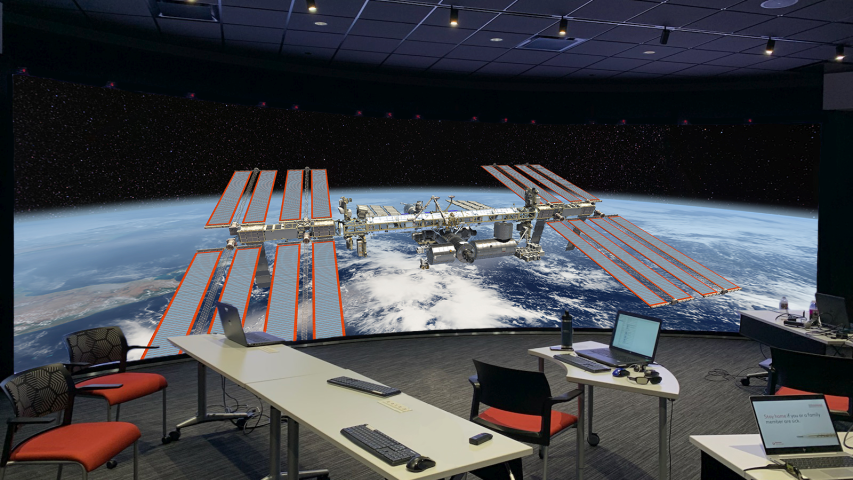
Das Problem ist, dass IMUs für die 6DOF-Verfolgung (d. h. Ausrichtung und Position) eine feste durchschnittliche Kopfposition verwenden, was bedeutet, dass eine Person in einem mit einem Sicherheitsgurt gesicherten Sitz mehr oder weniger nur ihren Kopf drehen kann, was natürlich bis zu einem gewissen Grad in Ordnung sein kann. Ein optisches Trackingsystem wie unser SMARTTRACK (über dem Instrumentenbrett montiert) bietet jedoch eine konsistente und genaue 6DOF-Positionsverfolgung, die die genaue Position des Kopfes des Piloten im Raum erfasst und sich auf natürliche Weise an Abweichungen in der Kopfhöhe oder -position relativ zum Cockpit anpasst, ohne dass eine manuelle Neukalibrierung erforderlich ist. Dadurch wird sichergestellt, dass jeder Pilot die virtuelle Umgebung aus seiner eigenen natürlichen Perspektive sieht.
Darüber hinaus leidet die optische Verfolgung nicht unter den Ungenauigkeiten, die durch die IMU-„Drift“ verursacht werden, selbst wenn Piloten unterschiedlicher Größe das System wiederholt verwenden. Da die Kameras des optischen Systems vorkalibrierte Targets verfolgen (normalerweise auf dem HMD montiert), bleibt die Positionsgenauigkeit im Laufe der Zeit erhalten. Dadurch wird sichergestellt, dass bei größeren oder kleineren Piloten keine Fehler beim Tracking aufgrund akkumulierter Fehler auftreten.
Das Ergebnis: verbesserte Immersion, gleichbleibende Genauigkeit und realistischere Trainingsszenarien.